|
<< Click to Display Table of Contents >> Achse |
  
|
|
<< Click to Display Table of Contents >> Achse |
|
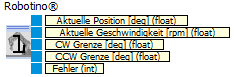
Gibt die Sensorwerte einer Achse aus.
Ausgänge |
Typ |
Einheit |
Standard |
Beschreibung |
||||||||||||||||||
Aktuelle Position |
float |
Grad |
Die aktuelle Achsenstellung. |
|||||||||||||||||||
Aktuelle Geschwindigkeit |
float |
rpm |
Die aktuelle Drehgeschwindigkeit der Achse. |
|||||||||||||||||||
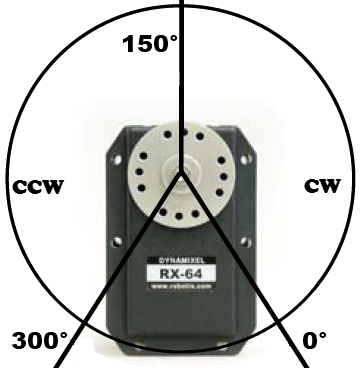
CW Grenze |
float |
Grad |
Die Grenze bei Drehung im Uhrzeigersinn. |
|||||||||||||||||||
CCW Grenze |
float |
Grad |
Die Grenze bei Drehung gegen den Uhrzeigersinn. |
|||||||||||||||||||
Fehler |
int |
Anzeige eines Fehlers. Der Wert 0 zeigt an, dass kein Fehler vorliegt.
|
Siehe auch das Beispiel zur Verwendung des elektrischen Greifarms.