|
<< Click to Display Table of Contents >> Motor |
  
|
|
<< Click to Display Table of Contents >> Motor |
|
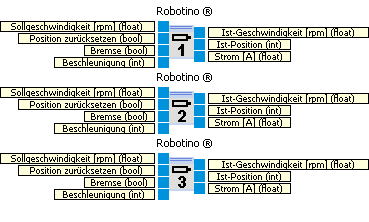
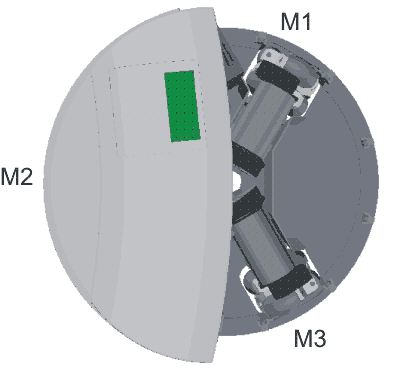
Dieser Funktionsblock repräsentiert einen der drei Antriebsmotoren von Robotino. Die Nummer des Motors ist aus der Grafik des Funktionsblocks ersichtlich.
.
Eingänge |
Typ |
Einheit |
Standard |
Beschreibung |
Sollgeschwindigkeit |
float |
rpm |
0 |
Die Sollgeschwindigkeit des Motors in Umdrehungen pro Minute (rounds per minute, rpm). Zu beachten ist, dass sich zwischen Motor und Rad ein 16:1 Getriebe befindet. |
Position zurücksetzen |
bool |
false |
Wenn wahr (true) wird der Zähler der Impulse des Drehgebers des Motors auf 0 gesetzt. |
|
Bremse |
bool |
false |
Wenn wahr (true), wird der Motor gestoppt. |
|
Beschleunigung |
int |
100 |
Kopplung zwischen Sollgeschwindigkeit am Eingang und tatsächlich übertragener Sollgeschwindigkeit (siehe auch |
|
Ausgänge |
||||
Geschwindigkeit |
float |
rpm |
Die Istgeschwindigkeit des Motors. |
|
Position |
int |
Die seit Einschalten von Robotino oder seit einem vorangegangenen Übergang am "Position zurücksetzen" Eingang von wahr (true) nach unwahr (false) gezählten Impulse des auf der Motorachse angebrachten Drehgebers. Der Drehgeber erzeugt 2000 Impuls pro Motorumdrehung. Kann zur Ist-Positionierung des angetriebenen Rads benutzt werden. |
||
Strom |
float |
A |
Der vom Motor aufgenommene Strom in A. |