|
<< Click to Display Table of Contents >> Omniantrieb |
  
|
|
<< Click to Display Table of Contents >> Omniantrieb |
|
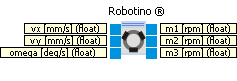
Berechnet die Sollgeschwindigkeiten der Motoren 1,2 und 3 aufgrund der Vorgabe einer Sollgeschwindigkeit in x und y-Richtung und einer Solldrehgeschwindigkeit.
Eingänge |
Typ |
Einheit |
Standard |
Beschreibung |
vx |
float |
mm/s |
0 |
Sollgeschwindigkeit in x-Richtung. |
vy |
float |
mm/s |
0 |
Sollgeschwindigkeit in y-Richtung. |
omega |
float |
deg/s |
0 |
Solldrehgeschwindigkeit |
Ausgänge |
||||
m1 |
float |
rpm |
Sollgeschwindigkeit Motor 1 |
|
m2 |
float |
rpm |
Sollgeschwindigkeit Motor 2 |
|
m3 |
float |
rpm |
Sollgeschwindigkeit Motor 3 |
Der Funktionsblock "Omniantrieb (invers)" berechnet vx, vy und omega aus den Drehgeschwindigkeiten der Motoren.
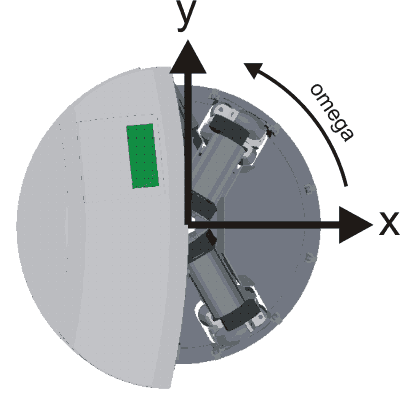
Die Abbildung zeigt Robotinos lokales Koordinatensystem. Ein positiver Wert für die Drehgeschwindigkeit omega erzeugt von oben betrachtet eine Rotation gegen den Uhrzeigersinn.