|
<< Click to Display Table of Contents >> Omniantrieb Invers |
  
|
|
<< Click to Display Table of Contents >> Omniantrieb Invers |
|
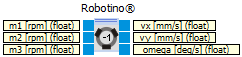
Berechnet die Istgeschwindigkeit und Istdrehgeschwindigkeit aufgrund der Vorgabe von einzelnen Motorgeschwindigkeiten.
Eingänge |
||||
m1 |
float |
rpm |
Sollgeschwindigkeit Motor 1 |
|
m2 |
float |
rpm |
Sollgeschwindigkeit Motor 2 |
|
m3 |
float |
rpm |
Sollgeschwindigkeit Motor 3 |
|
Ausgänge |
||||
vx |
float |
mm/s |
0 |
Geschwindigkeit in x-Richtung. |
vy |
float |
mm/s |
0 |
Geschwindigkeit in x-Richtung. |
omega |
float |
deg/s |
0 |
Drehgeschwindigkeit |