|
<< Click to Display Table of Contents >> Distance sensors |
  
|
|
<< Click to Display Table of Contents >> Distance sensors |
|
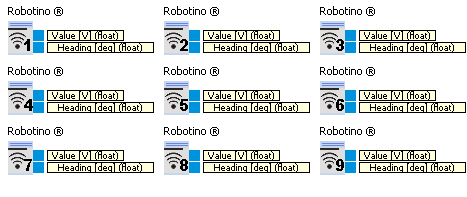
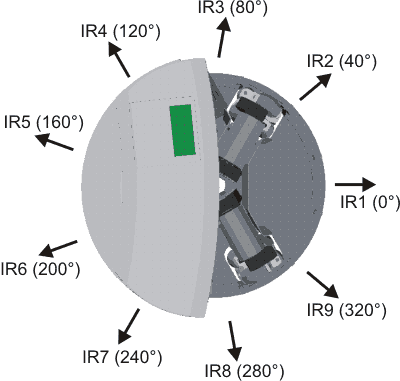
The sensor reading of a distance sensor.
Inputs |
Type |
Unit |
Default |
Description |
Outputs |
||||
Value |
float |
Volt |
Analog reading of the distance sensor in V. The scaling and conversion of a distance value must be effected by the user. |
|
Heading |
float |
Degree |
The heading of the sensor in Robotino's local coordinate system (see image below). The heading is calculated from the sensor number as Heading = 40° x (Number - 1) |