Búsqueda y aproximación



|
|
|
Búsqueda y aproximación |
|
|
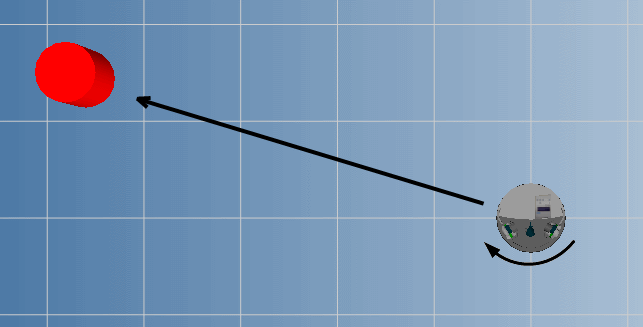
En este ejemplo, se crea un programa de Robotino View que localiza un objeto en color a través de la cámara de Robotino y se acerca a éste. El programa está dividido en dos subprogramas.
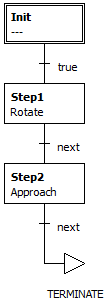
La apariencia del programa principal se puede ver más abajo:
Del paso Init vacío, el programa principal pasa inmediatamente al paso "Step1". El programa principal permanece en este paso hasta que la variable global "next" sea igual a 0. El subprograma "Girar" fija en "next" un 1 cuando Robotino se ha girado hacia el objeto en color. El subprograma "Arranque" fija primero un 0 en "next", de modo que "Step2" permanece activo. Cuando Robotino se ha acercado lo suficiente al objeto en color, el subprograma "Arranque" fija un 1 en "next", y el programa principal salta a "Terminate" y se cierra.
|