Ejemplo



|
|
|
Ejemplo |
|
|
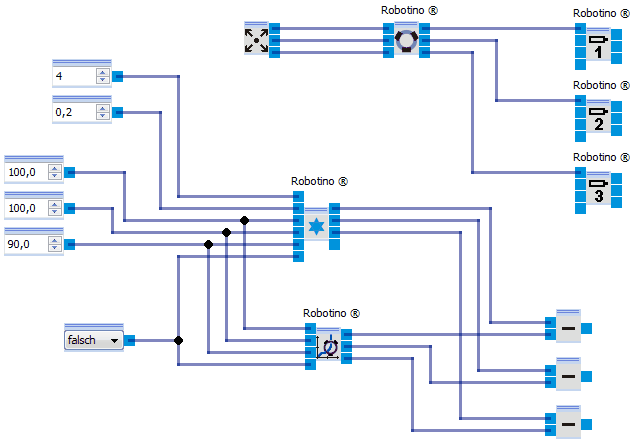
El panel de control se utiliza para mover el Robotino.
NorthStar detectará el proyector que pertenece a la sala número 4. El nuevo proyector NorthStar debe establecerse para la sala 1.
A través de la constante booleana (true/false) el sistema de coordenadas de NorthStar y la odometría pueden transformarse de forma que "pose NorthStar actual" == "pose odometría actual" == (100,100,90).
Restando los componentes de NorthStar y odometría, puede verse el error que se produce entre odometría y NorthStar.
|