Omniaccionamiento



|
|
|
Omniaccionamiento |
|
|
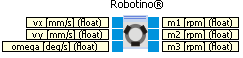
Calcula los valores de consigna de la velocidad de los motores 1, 2 y 3, según las velocidades de consigna vx, vy y omega.
El bloque de función "Onmiaccionamiento (inverso)", calcula vx, vy y omega a partir de las velocidades de rotación de los motores.
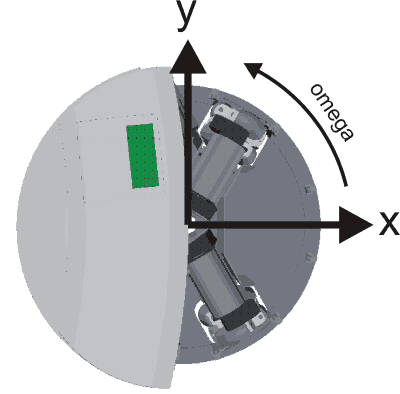
La figura muestra el sistema de coordenadas local de Robotino. Una velocidad de rotación positiva omega, genera una rotación en sentido antihorario mirando el Robotino desde arriba.
|