Recherche et approche



|
|
|
Recherche et approche |
|
|
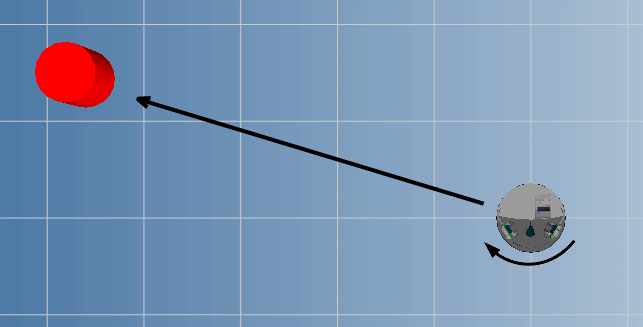
Cet exemple montre comment créer un programme Robotino View permettant de rechercher un objet de couleur à l'aide de la caméra de Robotino et de s'en approcher. Le programme se compose de deux sous-programmes.
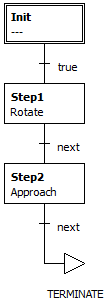
Le programme principal se présente comme indiqué ci-dessous :
Partant d'une étape d'initialisation vide, le programme principal passe immédiatement à l'état "Step1". Le programme principal demeure dans cette étape tant que la variable globale "next" est égale à 0. Le sous-programme "Rotation" met "next" à 1, dès que Robotino s'est tourné vers l'objet en couleur. Le sous-programme "Accostage" remet "next" provisoirement à 0, de sorte que "Step2" reste activé. Lorsque Robotino s'est suffisamment rapproché de l'objet en couleur, le sous-programme "Accostage" met "next" à 1 et le programme principal se termine par un saut à "Terminate".
|