Exemple



|
|
|
Exemple |
|
|
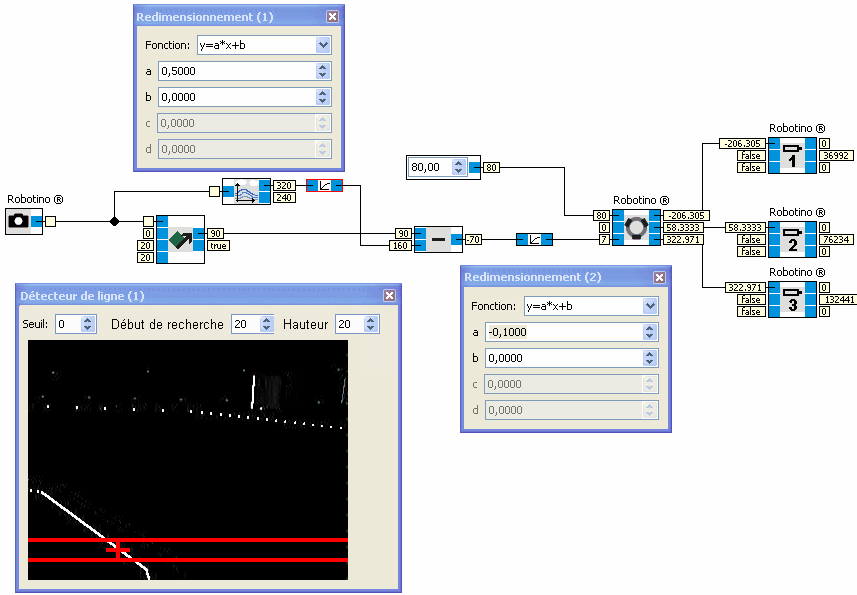
La caméra de Robotino délivre une image servant d'entrée au détecteur de ligne. La position x de la ligne dans l'image est représentée, à l'aide de l'information d'image, non pas dans la zone [0;largeur d'image] mais dans la zone [-largeur d'image/2; largeur d'image/2]. Après changement de signe et mise à l'échelle, on obtient une valeur directement utilisable comme valeur d'entrée de la vitesse angulaire des moteurs de Robotino. Ceci permet de faire tourner Robotino à gauche lorsque la ligne se trouve dans la moitié gauche de l'image et vers la droite lorsque la ligne se trouve dans la moitié droite de l'image. La vitesse d'avance étant constante, Robotino se déplace le long de la ligne. |