|
<< Click to Display Table of Contents >> Axis |
  
|
|
<< Click to Display Table of Contents >> Axis |
|
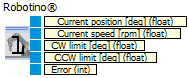
Sensor readings of one axis.
Outputs |
Typ |
Unit |
Default |
Description |
||||||||||||||||||
Current position |
float |
deg |
Current axis position. |
|||||||||||||||||||
Current speed |
float |
rpm |
Current speed of axis. |
|||||||||||||||||||
CW limit |
float |
deg |
Clockwise limit of rotation. |
|||||||||||||||||||
CCW limit |
float |
deg |
Counter-clockwise limit of rotation. |
|||||||||||||||||||
Error |
int |
Error. A value of zero indicates "No Error".
|
See the example how to use the grappler.