|
<< Click to Display Table of Contents >> Path driver |
  
|
|
<< Click to Display Table of Contents >> Path driver |
|
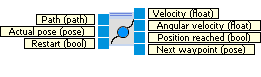
With the path driver it is possible to drive along paths.
From the path and the actual pose the velocity and the angular velocity are calculated so that Robotino drives straightforward along the path's single poses.
Inputs |
Type |
Unit |
Default |
Description |
Path |
path |
empty path |
The path to drive. |
|
Actual pose |
pose |
(0, 0, 0) |
The actual pose determined by odometry or SLAM. |
|
Restart |
bool |
false |
Restart the movement. |
|
Outputs |
||||
Velocity |
float |
mm/s |
Forward velocity. |
|
Angular velocity |
float |
deg/s |
Angular velocity. |
|
Position reached |
bool |
True, if the path is empty. Otherwise true, when the virtual point is located on the last path segment and v(d) = 0. |
||
Next way point |
pose |
The next target way point. |