|
<< Click to Display Table of Contents >> Suchen und annähren |
  
|
|
<< Click to Display Table of Contents >> Suchen und annähren |
|
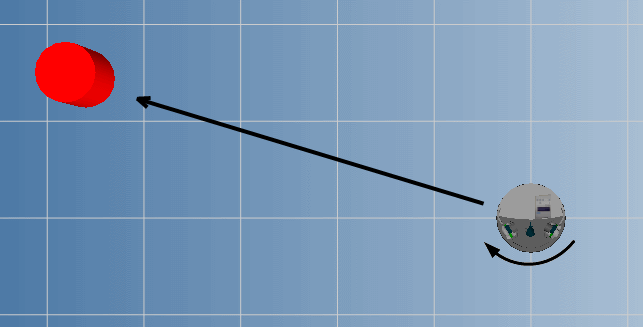
In diesem Beispiel wird ein Robotino View Programm erstellt, welches über Robotinos Kamera ein farbiges Objekt findet und sich diesem nähert. Das Programm gliedert sich in zwei Unterprogramme.
| • | Drehen: In diesem Unterprogramm dreht sich Robotino zu dem farbigen Objekt |
| • | Anfahren: In diesem Unterprogramm fährt Robotino auf das farbige Objekt zu und stoppt, sobald die von dem Objekt eingenommene Fläche im Kamerabild eine Grenze überschreitet. |
Das Hauptprogramm sieht wie unten gezeigt aus:
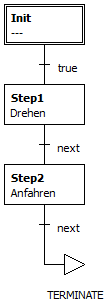
Aus dem leeren Init-Schritt springt das Hauptprogramm sofort in den Schritt "Step1". In diesem Schritt bleibt das Hauptprogramm solange die globale Variable "next" gleich 0 ist. Das Unterprogramm "Drehen" setzt "next" auf 1, wenn sich Robotino zu dem farbigen Objekt gedreht hat.
Das Unterprogramm "Anfahren" setzt "next" zuächst wieder auf 0, so dass "Step2" aktiv bleibt. Wenn Robotino sich dem farbigen Objekt weit genug angenährt hat, wird "next" durch das Unterprogramm "Anfahren" auf 1 gesetzt und das Hauptprogramm wird durch den Sprung zu "Terminate" beendet.