|
<< Click to Display Table of Contents >> North Star |
  
|
|
<< Click to Display Table of Contents >> North Star |
|
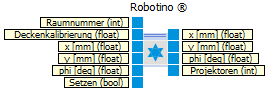
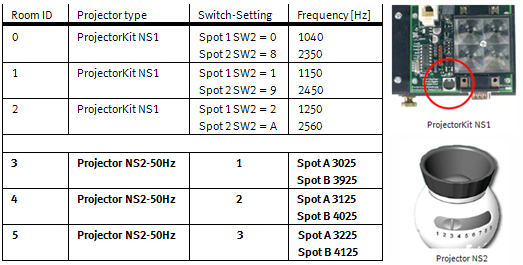
North Star ® ist ein Sensor, der mit Hilfe von Projektoren die absolute Position von Robotino® ermittelt.
Eingänge |
Typ |
Einheit |
Standard |
Beschreibung |
Raumnummer |
int |
3 |
Die Nummer des Raums, in welchem sich Robotino befindet. Räume werden mit 0 beginnend gezählt. |
|
Deckenkalibrierung |
float |
mm |
2800 |
Abstand zwischen Detektor und Decke. Bei einer Deckenhöhe von 3m beträgt der Abstand ca. 2800mm. |
x |
float |
mm |
0 |
x-Position des über den "Setzen" Eingang gesetzten Ursprungs. |
y |
float |
mm |
0 |
y-Position des über den "Setzen" Eingang gesetzten Ursprungs. |
phi |
float |
Grad |
0 |
Orientierung des über den "Setzen" Eingang gesetzten Ursprungs. |
Setzen |
bool |
false |
Wenn wahr (true) wird die Pose (x,y,phi) als Ursprung verwendet. |
|
Ausgänge |
||||
x |
float |
mm |
Die aktuelle x-Position. |
|
y |
float |
mm |
Die aktuelle y-Position. |
|
phi |
float |
Grad |
Die aktuelle Orientierung. |
|
Projektoren |
int |
Anzahl der sichtbaren Projektoren. |
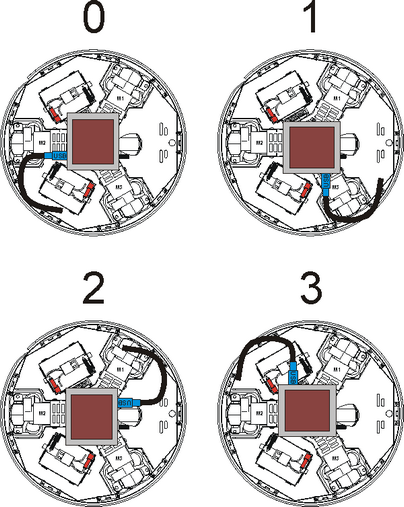
Der Northstar Detektor kann unterschiedlich auf Robotino montiert werden. Je nach Aufbau muss die Datei /etc/robotino/robotino.xml auf Robotino mit einem Editor angepasst werden. Der Wert für die Orientierung muss entsprechend der unten gezeigten Grafik eingestellt werden.
<NorthStar>
<!--The orientation of the northstar sensor. See www.openrobotino.org-->
<Orientation value="1" />
</NorthStar>