|
<< Click to Display Table of Contents >> Odometrie |
  
|
|
<< Click to Display Table of Contents >> Odometrie |
|
Diese Funktion benötigt die 1GB Compact-Flash Speicherkarte von Robotino (V 1.7 oder höher).
(Keine Funktion bei 256MB Speicherkarte, Version <=1.6)
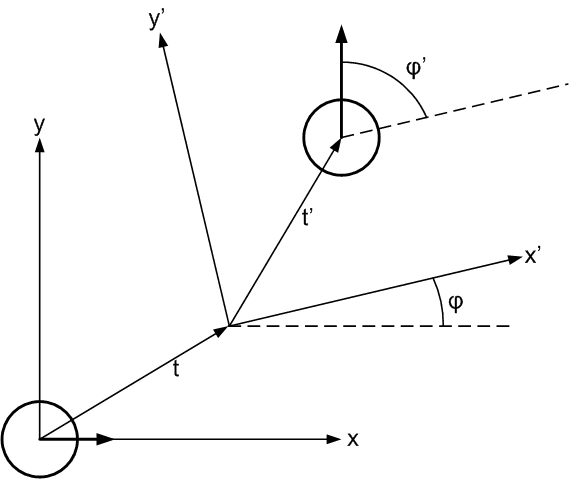
Odometrie bezeichnet die Berechnung der aktuellen Position eines Fahrzeuges aufgrund der vorangegangenen Drehungen der einzelnen Räder. Das Wort Odometrie setzt sich aus den griechischen Wörtern "hodos" (Übersetzung: "Reise") und "metron" (Übersetzung: "Messung") zusammen. Siehe auch http://de.wikipedia.org/wiki/Odometrie.
Die Drehung der Räder wird in möglichst hoher zeitlicher Auflösung erfasst. Zu jedem Zeitschritt wird dann aufgrund der Radgeschwindigkeiten die zurückgelegte Wegstrecke des Fahrzeuges berechnet. Die (sehr kleinen) Wegstrecken der einzelnen Zeitschritte werden addiert, so dass man die aktuelle Position bezogen auf den Startpunkt erhält. Dieses Verfahren liefert lokal gute Ergebnisse. Auf langen Strecken oder unter widrigen Umständen (Schlupf der Räder durch Staub auf dem Boden, Drift des Roboters aufgrund einer Vorzugsrichtung des Teppichs usw.) kommt es bei diesem Verfahren zu großen Abweichungen. Aus diesem Grund wird Odometrie fast immer mit anderen Verfahren kombiniert, um die auftretenden Fehler zu kompensieren.
Eingänge |
Typ |
Einheit |
Standard |
Beschreibung |
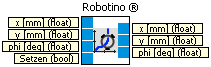
x |
float |
mm |
0 |
Die neue x-Position. Der Wert wird übernommen, wenn am "Setzen" Eingang wahr (true) anliegt. |
y |
float |
mm |
0 |
Die neue y-Position. Der Wert wird übernommen, wenn am "Setzen" Eingang wahr (true) anliegt. |
phi |
float |
Grad |
0 |
Die neue Orientierung. Der Wert wird übernommen, wenn am "Setzen" Eingang wahr (true) anliegt. |
Setzen |
bool |
false |
Wenn der Eingang wahr (true) ist, wird Robotinos Odometrie auf die an den Eingängen x, y, phi anliegenden Werte gesetzt. Um die Odometrie auf (0,0,0) zu setzen reicht es daher, den Eingang für einen Zeitschritt auf wahr (true) zu setzen. Liegt unwahr (false) an, so ändert sich die Odometrie nur durch Bewegung der Räder von Robotino. |
|
Ausgänge |
||||
x |
float |
mm |
Die aktuelle x-Position. |
|
y |
float |
mm |
Die aktuelle y-Position. |
|
phi |
float |
Grad |
Die aktuelle Orientierung. |