|
<< Click to Display Table of Contents >> Manipulator dialog |
  
|
|
<< Click to Display Table of Contents >> Manipulator dialog |
|
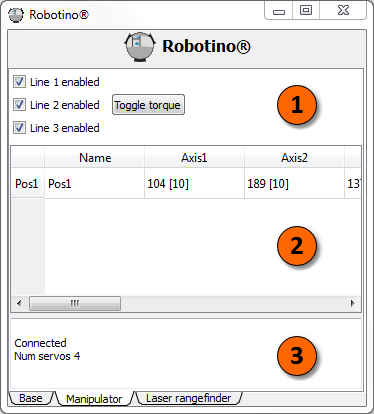
This dialog lets you configure Robotino's optional manipulator.
1 |
Line 1-3 enabled: Switch the power supply of the servos. In case of an error (servo LED blinking) the error can be cleared by switching off and on the servos' power supply. Toggle torque:Switch on/off the servos' drives. With drives switched on the red switch at Robotino's arm is illuminated. Drives can also be switched on/off with the red switch at Robotino's arm. |
2 |
List of stored positions. A position can be stored by pressing the green switch at Robotino's arm. Alternatively the context menu accessible by pressing the right mouse button can be used. |
3 |
Log window. To see log messages generated directly after connecting to Robotino the device dialog has to be visible. |
See the example how to use the grappler.