|
<< Click to Display Table of Contents >> Set-point (2) |
  
|
|
<< Click to Display Table of Contents >> Set-point (2) |
|
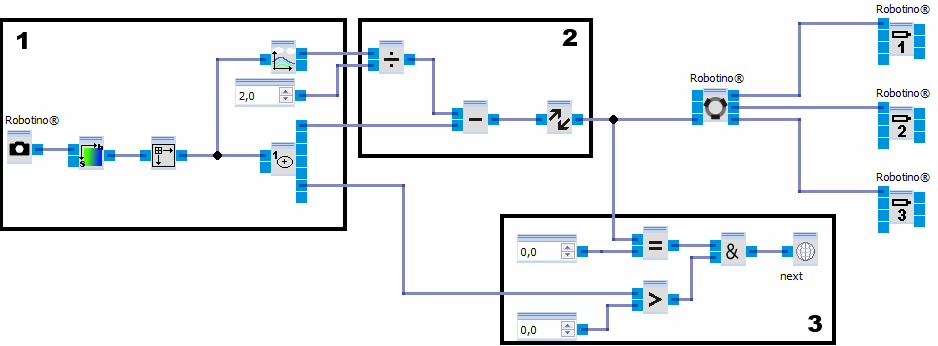
The set-point for the rotational speed is calculated by half image width minus the x-coordinates of the red cylinder. The Transferfunktion maps the distance in pixel to the rotational speed in degrees per second.
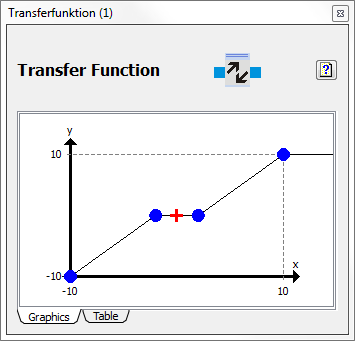
The input to the Transfer function is the distance of the red cylinder to the image center in pixel. If this distance is smaller than -10 Pixel Robotino is rotated by -10 deg/s. Up to a distance of -2 Pixel the rotational speed goes down to 0. If the distance is larger 2 pixel the rotational speed is increased up to 10 deg/s.
If the red cylinder is not visible the Segment tracker outputs 0 for the x-coordinate. The input to the Transfer function in this case is half image width so that Robotino is rotated by 10 deg/s.