|
<< Click to Display Table of Contents >> Obstacle avoidance |
  
|
|
<< Click to Display Table of Contents >> Obstacle avoidance |
|
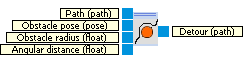
The module Obstacle avoidance calculates a detour for a path round a circular obstacle.
Inputs |
Type |
Unit |
Default |
Description |
Path |
path |
empty path |
The path to be driven. |
|
Obstacle pose |
pose |
(0, 0, 0) |
The position of the circular obstacle. |
|
Obstacle radius |
float |
mm |
100 |
The radius of the circular obstacle. Add the radius of Robotino and a saftey margin so that Robotino can pass by the obstacle. |
Angular distance |
float |
Grad |
10 |
The maximum angular distance between two points of the detour round the obstacle. |
Outputs |
||||
Detour |
path |
empty path |
Detour round the obstacle. |