<< Click to Display Table of Contents >>
Navigation: Function block library > Navigation > Obstacle avoidance >
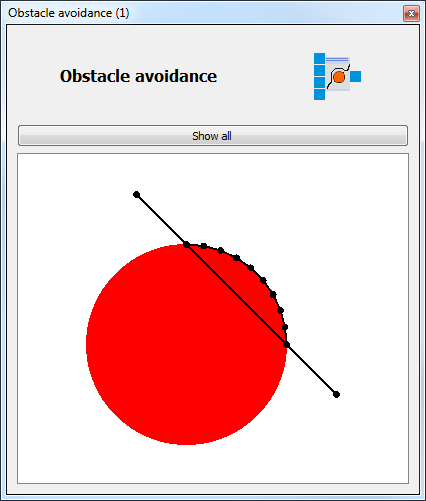
The dialog shows the original path, the obstacle and the detour.