|
<< Click to Display Table of Contents >> Motor |
  
|
|
<< Click to Display Table of Contents >> Motor |
|
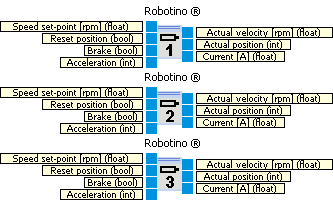
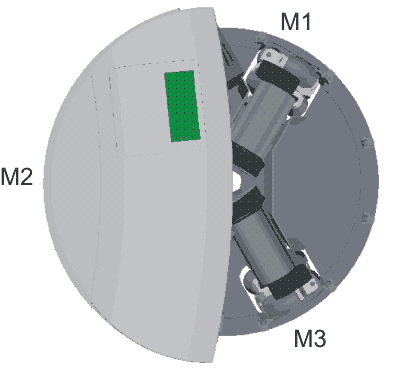
Access to one Robotino's motors. The motor number is displayed.
.
Inputs |
Type |
Unit |
Default |
Description |
Speed set-point |
float |
rpm |
0 |
The speed set-point of the motor control in rounds per minute. Please note that there is a 16:1 gear between motor and Robotino's wheel. |
Reset position |
bool |
false |
If true the tick counter of the motor's encoder is reset to 0. |
|
Brake |
bool |
false |
If true the motor is stopped. |
|
Acceleration |
int |
100 |
Coupling of speed set-point at the input and the speed set-point really transmitted (see |
|
Outputs |
||||
Actual velocity |
float |
rpm |
The actual velocity of the motor. |
|
Actual position |
int |
The number of ticks counted since power up of Robotino or since "Reset position" had been true and the false. The ticks are generated by the motor's encoder which generates 2000 ticks per round. |
||
Current |
float |
A |
The current measured at the motor's H-bridge. |