|
<< Click to Display Table of Contents >> Dialog |
  
|
|
<< Click to Display Table of Contents >> Dialog |
|
Parameter |
Description |
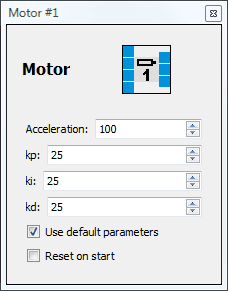
Acceleration |
Acceleration/Deceleration factor. With the maximum value 100 speed set-points are given directly to the motor's controller. With smaller values differences between speed set-points are flattened over time. This can be used to generate smooth motions of Robotino. |
kp |
Proportional term of the motor's PID controller |
ki |
Integral term of the motor's PID controller |
kd |
Differential term of the motor's PID controller |
Use default parameters |
Use the values for kp, ki and kd implemented in Robotinos firmware. These default values are also used if you set kp=ki=kd=255. |
Reset on start |
Initialize the Actual position with 0 at program start |
Velocity control of each motor is performed by a PID controller

The parameters are:
Kp
Ki = 1/Tn
Kd
From the values set in the dialog the controller parameters are calculated as:
Kp= kp / 2
Ki= ki / 1024
Kd= kd / 2
Default values are
kp = 25
ki = 25
kd = 25