|
<< Click to Display Table of Contents >> North Star |
  
|
|
<< Click to Display Table of Contents >> North Star |
|
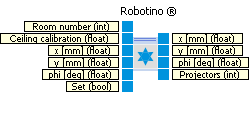
North Star ® is a sensor which determines Robotino®'s absolute position with the help of projectors.
Inputs |
Type |
Unit |
Default |
Description |
Room number |
int |
3 |
The room number in which Robotino is currently located. Rooms are enumerated starting with 0. |
|
Ceiling calibration |
float |
mm |
2800 |
Distance between detector and ceiling. If the ceiling height is 3m the distance between detector and ceiling is about 2800mm. |
x |
float |
mm |
0 |
x-position of the origin set by the input "Set". |
y |
float |
mm |
0 |
y-position of the origin set by the input "Set". |
phi |
float |
Degree |
0 |
Orientation of the origin set by the input "Set". |
Set |
bool |
false |
If true, the current pose (x,y,phi) is used as origin. |
|
Outputs |
||||
x |
float |
mm |
The current x-position in global coordinates. |
|
y |
float |
mm |
The current y-position in global coordinates. |
|
phi |
float |
Degree |
The current orientation in global coordinates. |
|
Projektoren |
int |
Number of visible projectors. |
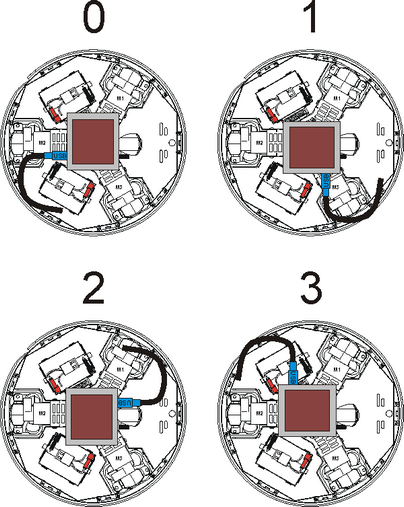
The Northstar detector can be attached to Robotino in different ways. Depending on the configuration the file /etc/robotino/robotino.xml on robotino must be adapted with a text editor. The value for the orientation must be set according to the figure below.
<NorthStar>
<!--The orientation of the northstar sensor. See www.openrobotino.org-->
<Orientation value="1" />
</NorthStar>