|
<< Click to Display Table of Contents >> Odometry |
  
|
|
<< Click to Display Table of Contents >> Odometry |
|
For this functionality a 1GB Compact-Flash memory card for Robotino (V 1.7 or higher) is needed.
(No functionality with 256MB memory cards, Version <=1.6)
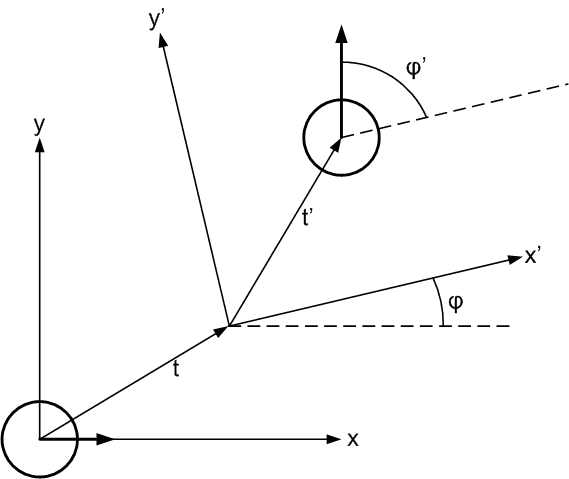
Odometry is the use of data from the movement of actuators to estimate change in position over time. See http://en.wikipedia.org/wiki/Odometry.
The rotation of wheels is measured with the highest time resolution possible. In every time step the distance driven by the vehicle is calculated from the wheels rotational speed. These very small distances from the single time steps are integrated over time. This leads to the actual position relative to the starting position. This method yields good local performance. On long distances or under adverse conditions (wheels slip because of dust on the floor, drift because of preferential direction of the carpet) this method leads to very large errors. On this account odometry is always combine with other methods to compensate for the described errors.
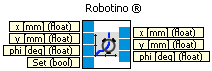
Inputs |
Type |
Unit |
Default |
Description |
x |
float |
mm |
0 |
The new x-position. Odometry is reset to the new position if "Set" is true. |
y |
float |
mm |
0 |
The new y-position. Odometry is reset to the new position if "Set" is true. |
phi |
float |
Degree |
0 |
The new orientation. Odometry is reset to the new position if "Set" is true. |
Set |
bool |
false |
If true, the odometry is set to the values from inputs x, y, and phi. To reset the odometry to (0,0,0) you only need to set this input true for one time step. The other inputs do not need to be connected, because the default values are 0. |
|
Outputs |
||||
x |
float |
mm |
The current x-position from the odometry in global coordinates. |
|
y |
float |
mm |
The current y-position from the odometry in global coordinates. |
|
phi |
float |
Degree |
The current orientation from the odometry in global coordinates. |