|
<< Click to Display Table of Contents >> Omnidrive |
  
|
|
<< Click to Display Table of Contents >> Omnidrive |
|
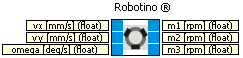
Calculates the speed set-points of motor 1, 2 and 3 according to set-velocities vx, vy and omega.
Inputs |
Type |
Unit |
Default |
Description |
vx |
float |
mm/s |
0 |
Set-velocity in x-direction in Robotino's local coordinate system. |
vy |
float |
mm/s |
0 |
Set-velocity in y-direction in Robotino's local coordinate system. |
omega |
float |
deg/s |
0 |
Set-rotational velocity. |
Outputs |
||||
m1 |
float |
rpm |
Speed set-point motor 1 |
|
m2 |
float |
rpm |
Speed set-point motor 2 |
|
m3 |
float |
rpm |
Speed set-point motor 2 |
The function block "Omnidrive (inverse)" calculates vx, vy and omega from the motors' rotation speeds.
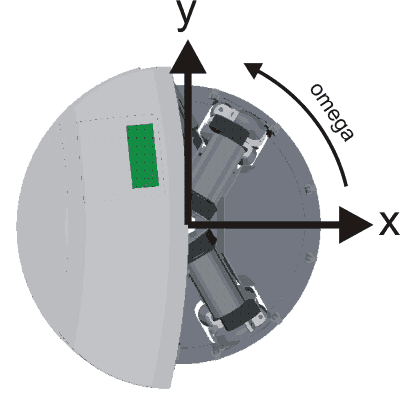
The image shows Robotino's local coordinate system. A positive rotational velocity omega generates a counter-clockwise rotation when looking from top onto Robotino.