|
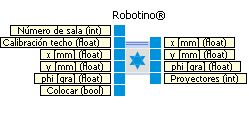
North Star ® es un sensor que determina la posición absoluta del Robotino® con la ayuda de proyectores.
Entradas
|
Tipo
|
Unidad
|
Predeterminado
|
Descripción
|
Número de sala
|
int
|
|
3
|
El número de la sala en la que se halla actualmente Robotino.
Las salas se numeran empezando por 0.
|
Calibración techo
|
float
|
mm
|
2800
|
Distancia entre el detector y el techo. Si la distancia al techo es de 3 m, la distancia entre el detector y el techo es de aproximadamente 2800 mm.
|
x
|
float
|
mm
|
0
|
posición x del origen, establecido por la entrada "Set".
|
y
|
float
|
mm
|
0
|
posición y del origen, establecido por la entrada "Set".
|
phi
|
float
|
Grados
|
0
|
Orientación del origen, establecido por la entrada "Set".
|
Set
|
bool
|
|
false
|
Si es verdadera (true), se utiliza la pose actual (x,y,phi) como origen.
|
|
|
|
|
|
Salidas
|
|
|
|
|
x
|
float
|
mm
|
|
La posición x actual en las coordenadas globales.
|
y
|
float
|
mm
|
|
La posición y actual en las coordenadas globales.
|
phi
|
float
|
Grados
|
|
La orientación actual en las coordenadas globales.
|
Proyectores
|
int
|
|
|
Número de proyectores visibles.
|
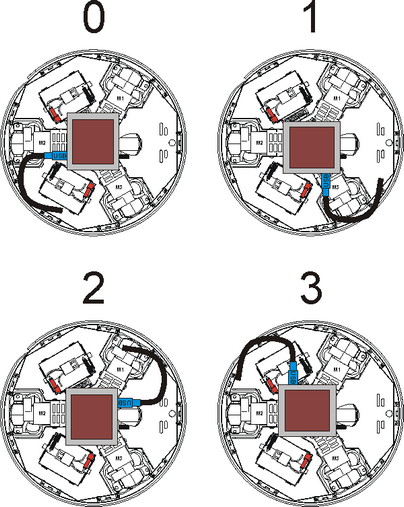
El detector NorthStar puede fijarse al Robotino de diferentes formas. Según la configuración, el archivo: /etc/robotino/robotino.xml del robotino debe ser adaptado con un editor de texto. El valor de la orientación debe establecerse según la figura inferior.
<NorthStar>
<!--The orientation of the northstar sensor. See www.openrobotino.org-->
<Orientation value="1" />
</NorthStar>
|


