|
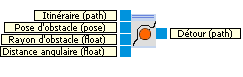
Le module d'évitement d'obstacle calcule, pour un itinéraire donné, une déviation autour d'un obstacle circulaire.
Entrées
|
Type
|
Unité
|
Standard
|
Description
|
Course
|
path
|
|
Itinéraire vide
|
L'itinéraire à parcourir.
|
Pose de l'obstacle
|
pose
|
|
(0, 0, 0)
|
La position de l'obstacle circulaire.
|
Le rayon de l'obstacle
|
float
|
mm
|
100
|
Le rayon de l'obstacle circulaire.
|
Distance angulaire
|
float
|
Degré
|
10
|
La distance angulaire maximale entre deux points de contrôle du détour autour de l'obstacle.
|
|
|
|
|
|
Sorties
|
|
|
|
|
Détour
|
path
|
|
Itinéraire vide
|
Détour autour de l'obstacle.
|
|


