Dialogue de configuration 2



|
|
|
Dialogue de configuration 2 |
|
|
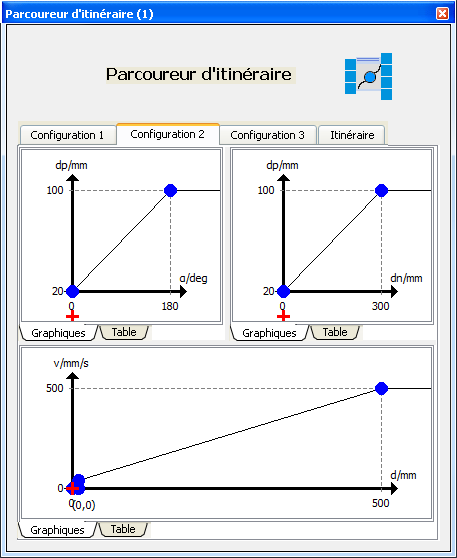
En haut à gauche Relation entre distance du robot au point de cheminement virtuel et angle du prochain tronçon d'itinéraire.
En haut à droite Relation entre distance du robot au point de cheminement virtuel et distance du point de cheminement suivant.
En bas Relation entre vitesse d'avance et distance de la fin de l'itinéraire. |