Parcoureur d'itinéraire



|
|
|
Parcoureur d'itinéraire |
|
|
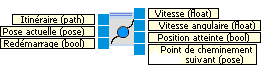
Le parcoureur d'itinéraire permet de rouler en suivant un itinéraire défini.
La vitesse d'avance et la vitesse angulaire sont calculées à partir de l'itinéraire et de la pose actuelle de sorte que Robotino exécute des trajectoires rectilignes entre les différentes poses.
|