Mouvements



|
|
|
Mouvements |
|
|
Il existe quatre types de mouvements. Deux conviennent aux véhicules holonomes, deux aux véhicules non holonomes. Robotino possédant un entraînement holonome - les trois degrés de liberté dans un plan peuvent être modifiés indépendamment l'un de l'autre - Robotino peu effectuer les quatre mouvements. Dans le cas des mouvements non holonomes, la sortie vy est constamment égale à 0.
Les mouvements débutent au démarrage du programme ou si l'entrée Redémarrage passe à vrai. Le mouvement ne débute effectivement dans le deuxième cas que lorsque l'entrée Redémarrage retourne à faux.
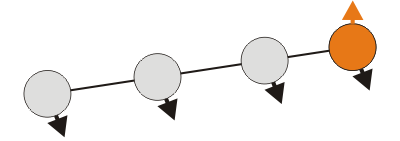
Mouvement 1 - rouler, tourner - (holonome) Étape 1 : Rouler vers la position de destination en conservant l'orientation de la position de départ Étape 2 : Lorsque la position de destination est atteinte tourner jusqu'à l'orientation de destination
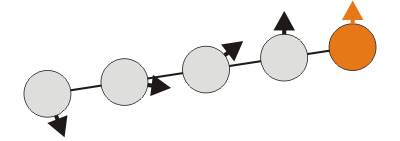
Mouvement 2 - rouler & tourner - (holonome) Étape 1 : Rouler et en même temps tourner jusqu'à l'orientation de destination
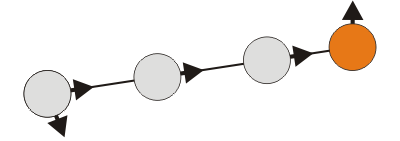
Mouvement 3 - tourner, rouler, tourner - (non holonome) Étape 1 : Tourner jusqu'en direction de roulage Étape 2 : Rouler jusqu'à la position de destination Étape 3 : Lorsque la position de destination est atteinte tourner jusqu'à l'orientation de destination
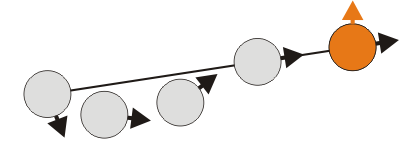
Mouvement 4 - rouler & tourner, tourner - (non holonome) Étape 1 : Rouler et tourner en direction de roulage Étape 2 : Lorsque la position de destination est atteinte tourner jusqu'à l'orientation de destination
|