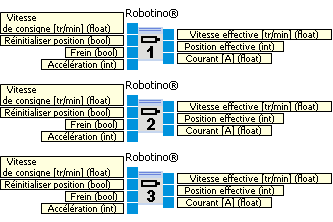
Entrées
|
Type
|
Unité
|
Standard
|
Description
|
Vitesse de consigne
|
float
|
tr/min
|
0
|
Vitesse de consigne du moteur en tours par minute (tr/min). Veuillez noter qu’un réducteur 16:1 est monté entre le moteur et la roue.
|
Mise à 0 de la position
|
bool
|
|
false
|
Si vrai (true), le compteur d'impulsions du codeur du moteur est mis à 0.
|
Frein
|
bool
|
|
false
|
Si vrai (true), le moteur est arrêté.
|
Accélération
|
int
|
|
100
|
Couplage de la vitesse de consigne à l'entrée et de la vitesse de consigne effectivement transmise (voir aussi  Dialogue). Dialogue).
|
|
|
|
|
|
Sorties
|
|
|
|
|
Vitesse
|
float
|
tr/min
|
|
La vitesse réelle du moteur
|
Position
|
int
|
|
|
Le nombre d'impulsions comptées du codeur implanté sur l'axe du moteur depuis la mise en marche de Robotino ou depuis la dernière transition de l'entrée "Mise à zéro de la position" de vrai (true) à faux (false). Le codeur génère 2000 impulsions par tour de moteur. Peut être utilisée pour obtenir la position réelle de la roue motrice.
|
Courant
|
float
|
A
|
|
Le courant absorbé par le moteur en A.
|