Dialogue



|
|
|
Dialogue |
|
|
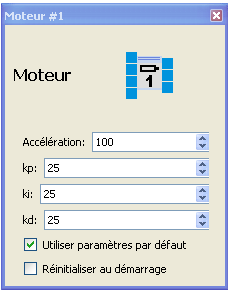
La régulation de vitesse de chaque moteur est assurée par un régulateur PID.
Les paramètres sont :
Kp Ki = 1/Tn Kd
Les valeurs paramétrables dans la boîte de dialogue sont converties en paramètres utilisables par le régulateur :
Kp= kp / 2 Ki= ki / 1024 Kd= kd / 2
Les valeurs par défaut sont : kp = 25 ki = 25 kd = 25
|