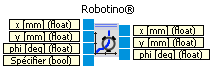
Odométrie



|
|
|
Odométrie |
|
|
Cette fonction nécessite la carte mémoire Compact Flash 1 Go de Robotino (V 1.7 ou suivante). (ne fonctionne pas avec la carte mémoire de 256 Mo, version <=1.6)
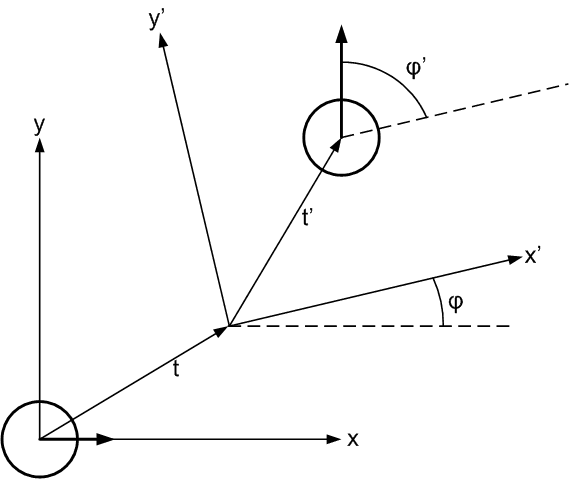
L'odométrie désigne le calcul de la position momentanée d'un véhicule en fonction des rotations effectuées par les roues. Le mot odométrie vient des mots grecs "hodos" (qui signifie "voyage") et "metron" (qui signifie "mesure"). Voir aussi http://fr.wikipedia.org/wiki/Odom%C3%A9trie.
La rotation des roues est mesurée à une fréquence si possible élevée. La distance parcourue est calculée en fonction de la vitesse de la roue à chaque intervalle de temps. Les (très petites) distances parcourues au cours des intervalles de temps sont additionnées ce qui donne la position actuelle par rapport au point de départ. Cette méthode fournit localement de bons résultats. Sur de longs parcours ou dans des conditions difficiles (patinage des roues dû à la poussière au sol, dérive du robot en raison d'une direction préférentielle du tapis, etc.), les résultats obtenus avec cette méthode varient fortement. C'est la raison pour laquelle l'odométrie est presque toujours combinée à d'autres méthodes pour compenser les erreurs.
|