|
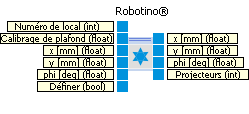
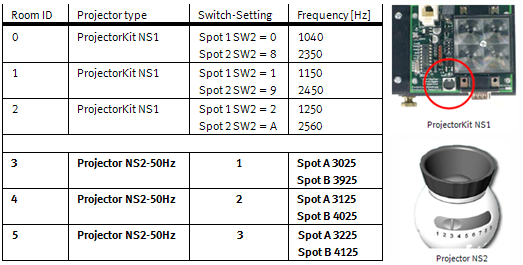
North Star ® est un capteur qui détecte, à l’aide de projecteurs, la position absolue de Robotino®.
Entrées
|
Type
|
Unité
|
Standard
|
Description
|
Numéro de local
|
int
|
|
3
|
Le numéro du local dans lequel Robotino se trouve.
Les locaux sont comptés en commençant par 0.
|
Calibrage du plafond
|
float
|
mm
|
2800
|
Distance entre le détecteur et le plafond. En cas de hauteur de plafond de 3 m, la distance est d'environ 2800 mm.
|
x
|
float
|
mm
|
0
|
Position x de l'origine définie par l'entrée "Définir".
|
y
|
float
|
mm
|
0
|
Position y de l'origine définie par l'entrée "Définir".
|
phi
|
float
|
Degré
|
0
|
Orientation de l'origine définie par l'entrée "Définir".
|
Définir
|
bool
|
|
false
|
Si vrai (true) la pose (x,y,phi) est prise pour origine.
|
|
|
|
|
|
Sorties
|
|
|
|
|
x
|
float
|
mm
|
|
La position x courante
|
y
|
float
|
mm
|
|
La position y courante
|
phi
|
float
|
Degré
|
|
L'orientation courante
|
Projecteurs
|
int
|
|
|
Nombre de projecteurs visibles.
|
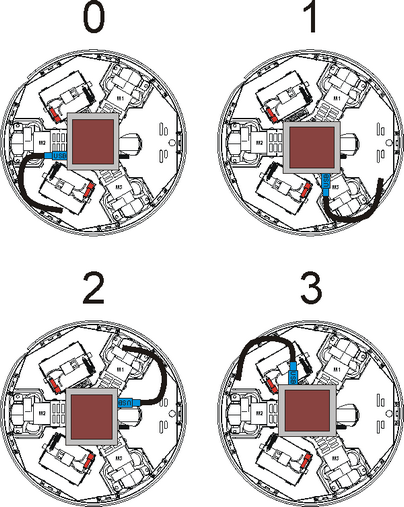
Le détecteur Northstar peut être monté de différentes manières sur Robotino. Selon le montage, le fichier /etc/robotino/robotino.xml devra être adapté à Robotino dans un éditeur. La valeur de l'orientation doit être réglée en fonction du graphique ci-dessous.
<NorthStar>
<!--The orientation of the northstar sensor. See www.openrobotino.org-->
<Orientation value="1" />
</NorthStar>
|


