Entraînement omnidirectionnel



|
|
|
Entraînement omnidirectionnel |
|
|
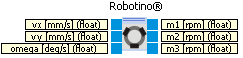
Calcule la vitesse de consigne des moteurs 1,2 et 3 sur la base de la consigne de vitesse dans l'axe x et dans l'axe y ainsi que d'une consigne de vitesse de rotation.
Le bloc de fonction "Entraînement omnidirectionnel (inverse)" calcule vx, vy et omega à partir des vitesses de rotation des moteurs.
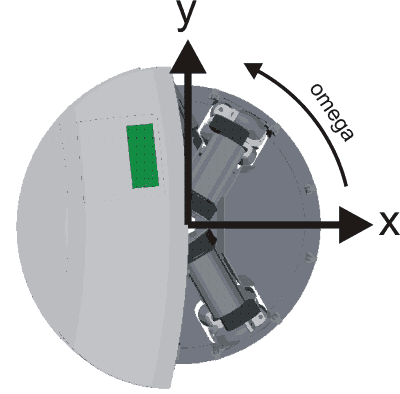
L'illustration montre le système de coordonnées local de Robotino. Une valeur positive de la vitesse de rotation oméga génère, vu de dessus, une rotation dans le sens horaire. |