|
<< Click to Display Table of Contents >> Dialog |
  
|
|
<< Click to Display Table of Contents >> Dialog |
|
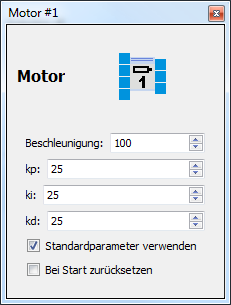
Parameter |
Beschreibung |
Beschleunigung |
Beschleunigungs- bzw. Verzögerungsfaktor. Mit dem Maximalwert 100 wird eine Sollgeschwindigkeit direkt an den Motor weitergegeben. Bei kleineren Werten wird eine Rampe gefahren. Dadurch kann eine weichere Bewegung des Roboters erreicht werden. |
kp |
Proportionalanteil des dem Motor vorgeschalteten PID Reglers |
ki |
Integralanteil des dem Motor vorgeschalteten PID Reglers |
kd |
Differentialanteil des dem Motor vorgeschalteten PID Reglers |
Standardparameter verwenden |
Die in der Firmware von Robotinos EA Karte hinterlegten Werte für kp, ki und kd verwenden. Die Standardparameter werden ebenfalls verwendet, wenn kp=ki=kd=255 gesetzt wird. |
Bei Start zurücksetzen |
Initialisierung des Positionswertes mit 0 bei jedem Programmstart |
Die Geschwindigkeitsregelung jedes Motors wird von einem PID Regler übernommen.

Die Parameter sind:
Kp
Ki = 1/Tn
Kd
Die im Dialog einstellbaren Werte werden auf die vom Regler verwendeten Parameter umgerechnet:
Kp= kp / 2
Ki= ki / 1024
Kd= kd / 2
Die Standardwerte sind
kp = 25
ki = 25
kd = 25