|
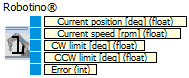
Emite los valores recogidos por los sensores de un eje.
Salidas
|
Tipo
|
Unidad
|
Estándar
|
Descripción
|
Posición actual
|
Float
|
Grados
|
|
La posición actual del eje.
|
Velocidad actual
|
Float
|
rpm
|
|
La velocidad de rotación actual del eje.
|
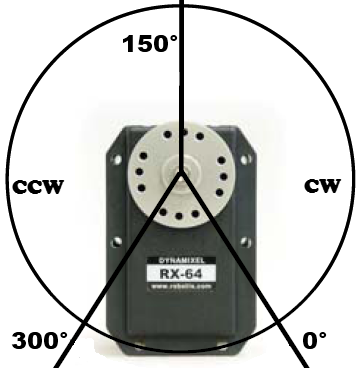
Límite CW
|
Float
|
Grados
|
|
El límite si la rotación se realiza en el sentido de las agujas del reloj.
|
Límite CCW
|
Float
|
Grados
|
|
El límite si la rotación se realiza en el sentido contrario al de las agujas del reloj.
|
Fallo
|
int
|
|
|
Se muestra un fallo. El valor 0 indica que no hay ningún fallo pendiente.
Bit
|
Descripción
|
0
|
Tensión de entrada incorrecta
|
1
|
La posición nominal no está dentro del ángulo límite.
|
2
|
El servo está demasiado caliente.
|
3
|
El comando corresponde a una zona no válida.
|
4
|
Fallo en la suma de comprobación
|
5
|
No se puede aplicar el par necesario para un movimiento.
|
6
|
Comando desconocido.
|
7
|
Fallo USB.
|
|
Véase también el ejemplo sobre la utilización del brazo de agarre eléctrico.
| 

