Controlador de ruta



|
|
|
Controlador de ruta |
|
|
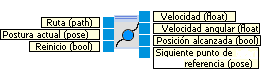
Con el controlador de ruta es posible conducir a lo largo de rutas.
A partir de la ruta y de la pose actual, se calculan la velocidad y la velocidad angular, de forma que Robotino sea conducido de forma rectilínea a lo largo de las poses individuales de la ruta.
|