Movimientos



|
|
|
Movimientos |
|
|
Son posibles cuatro clases de movimientos diferentes. Dos de ellos son aplicables para vehículos holónomos y no-holónomos cada uno de ellos. Como sea que Robotino tiene un accionamiento holónomo – los tres grados de libertad (x, y, giro) pueden ser alterados independientemente – Robotino puede realizar las cuatro clases de movimiento. Para los movimientos no-holónomos, la salida vy es 0.
El movimiento empieza cuando se ejecuta el programa o cuando la entrada "Reiniciar" es verdadera (true). De hecho, en el segundo caso el movimiento empieza cuando la entrada entrada "Reiniciar" se pone en false.
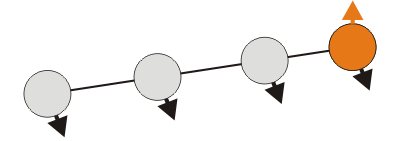
Movimiento 1 - conducir, girar - (holónomo) Paso 1: conducir a la posición de destino manteniendo la orientación de la posición inicial. Paso 2: tras alcanzar la posición de destino, girar hasta alcanzar la orientación de destino.
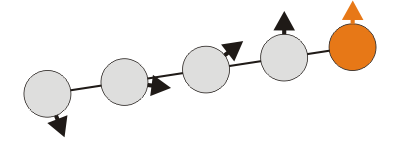
Movimiento 2 - conducir y girar - (holónomo) Paso 1: conducir y simultáneamente girar a la orientación de destino
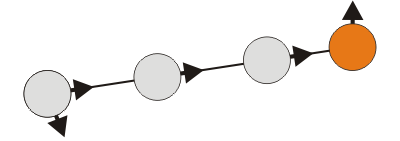
Movimiento 3 - girar, conducir, girar - (no-holónomo) Paso 1: girar a la dirección de conducción Paso 2: conducir hasta la posición de destino Paso 3: tras alcanzar la posición de destino, girar hasta alcanzar la orientación de destino.
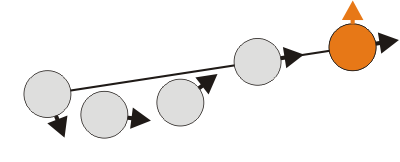
Movimiento 4 - conducir y girar, girar - (no-holónomo) Paso 1: Conducir y girar en el sentido de la conducción Paso 2: tras alcanzar la posición de destino, girar hasta alcanzar la orientación de destino.
|