Lectura analógica de un sensor de distancia en V. El escalado y la conversión del valor debe ser realizado por el usuario.
Orientación
float
Grados
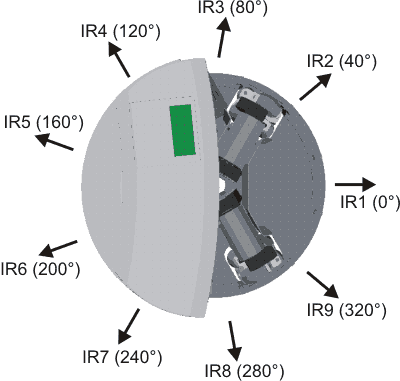
La orientación del sensor en el sistema de coordenadas local de Robotino (ver imagen siguiente). La orientación se calcula a partir del número del sensor como sigue: