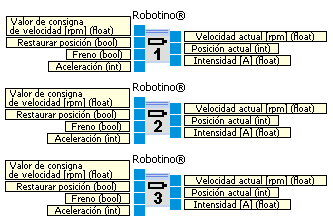
Entradas
|
Tipo
|
Unidad
|
Predeterminado
|
Descripción
|
Valor de consigna de velocidad
|
float
|
rpm
|
0
|
El valor de consigna de velocidad del regulador del motor en vueltas por minuto. Tenga en cuenta que hay un reductor con una relación 16:1 entre el motor y la rueda del Robotino.
|
Restablecer posición
|
bool
|
|
false
|
Si es verdadera (true) el contador de pulsos del encoder del motor se restablece a 0.
|
Freno
|
bool
|
|
false
|
Si es verdadera (true) el motor está parado.
|
Aceleración
|
int
|
|
100
|
Acoplamiento del valor de consigna de velocidad en la entrada y el valor de consigna de velocidad realmente transmitido (véase  Diálogo) Diálogo)
|
|
|
|
|
|
Salidas
|
|
|
|
|
Velocidad actual
|
float
|
rpm
|
|
La velocidad actual del motor.
|
Posición actual
|
int
|
|
|
El número de pulsos contados desde que se ha aplicado tensión al Robotino o desde que "Restablecer posición" ha sido verdadero (true) y luego falso (false). Los pulsos son generados por el encoder del motor, que genera 2000 pulsos por vuelta.
|
Intensidad
|
float
|
A
|
|
La intensidad (corriente) medida en el puente H del motor.
|