|
Parámetro
|
Descripción
|
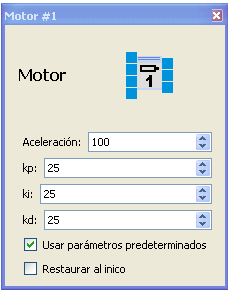
Aceleración
|
Factor de Aceleración/Deceleración. Con el valor máximo, se dan directamente 100 valores de consigna de velocidad al controlador del motor. Con valores inferiores, las diferencias entre los valores de consigna de velocidad se alisan con el tiempo. Esto puede utilizarse para generar movimientos suaves en el Robotino.
|
kp
|
Término proporcional del regulador PID del motor.
|
ki
|
Término integral del regulador PID del motor.
|
kd
|
Término diferencial del regulador PID del motor.
|
Usar parámetros predeterminados
|
Utilizar los valores de kp, ki y kd implementados en el firmware del Robotino. También se usan estos valores predeterminados si se establece kp=ki=kd=255.
|
Restablecer al inicio
|
Inicializar la posición Actual a 0 al inicio del programa
|
El control de velocidad de cada motor se realiza con un regulador PID.

Los parámetros son:
Kp
Ki = 1/Tn
Kd
A partir de los valores establecidos en el diálogo, los parámetros de regulación se calculan de la siguiente manera:
Kp= kp / 2
Ki= ki / 1024
Kd= kd / 2
Los valores predeterminados son:
kp = 25
ki = 25
kd = 25
|


