|
<< Click to Display Table of Contents >> Beispiel |
  
|
|
<< Click to Display Table of Contents >> Beispiel |
|
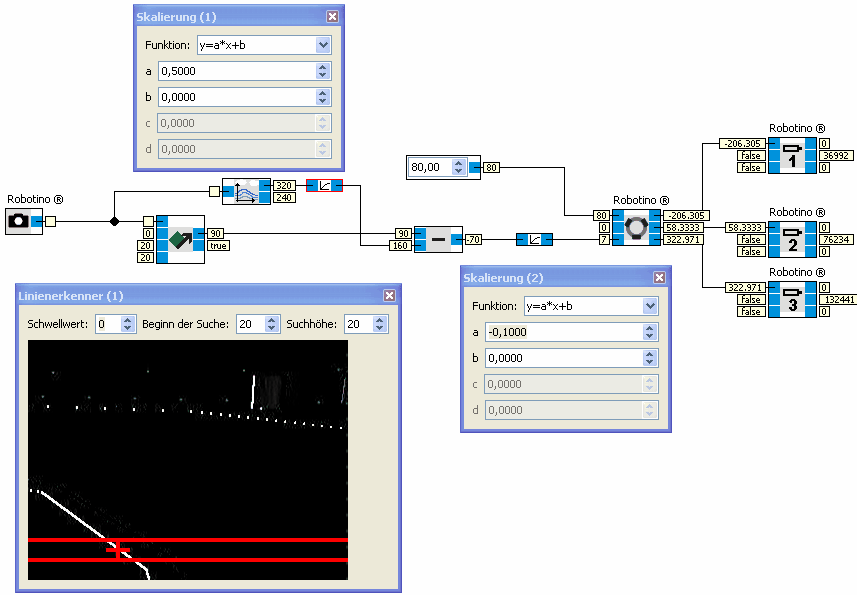
Robotinos Kamera liefert ein Bild, welches als Eingang für den Linienerkenner dient. Mithilfe der Bildinformation wird die x-Position der Linie im Bild von dem Bereich [0;Bildbreite] in den Bereich [-Bildbreite/2; Bildbreite/2] abgebildet. Nach anschließendem Wechsel des Vorzeichens und Skalierung erhält man einen Wert, der direkt als Eingangswert für die Winkelgeschwindigkeit des Antriebs von Robotino dienen kann. Auf diese Weise dreht Robotino nach links, wenn sich die Linie in der linken Bildhälfte befindet und nach rechts, wenn sich die Linie in der rechten Bildhälfte befindet. Mit einer Konstanten Vorwärtsgeschwindigkeit fährt Robotino der Linie nach.