|
<< Click to Display Table of Contents >> Dialog |
  
|
|
<< Click to Display Table of Contents >> Dialog |
|
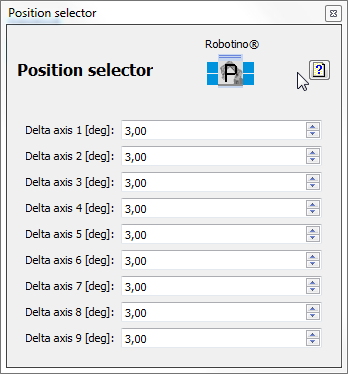
Specification of the accepted tolerance from the target position. If all axes positions are within the range of tolerances of the target position the output "Position reached" becomes true.