|
<< Click to Display Table of Contents >> Position Driver |
  
|
|
<< Click to Display Table of Contents >> Position Driver |
|
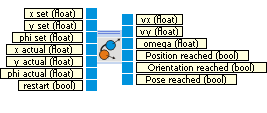
The position driver is used to drive Robotino to a given position.
The position driver generates velocity and angular velocity set values to drive Robotino from the actual to the set position.
Inputs |
Type |
Unit |
Description |
x set |
float |
mm |
x coordinate of the set position in the global coordinate system. |
y set |
float |
mm |
y coordinate of the set position in the global coordinate system. |
phi set |
float |
deg |
phi angle of the set position in the global coordinate system. |
x actual |
float |
mm |
x coordinate of the actual position in the global coordinate system. |
y actual |
float |
mm |
y coordinate of the actual position in the global coordinate system. |
phi actual |
float |
deg |
phi angle of the actual position in the global coordinate system. |
restart |
bool |
Restart movement |
|
Outputs |
|||
vx |
float |
mm/s |
set velocity in x direction in Robotino's local coordinate system |
vy |
float |
mm/s |
set velocity in y direction in Robotino's local coordinate system |
omega |
float |
deg/s |
set angular velocity. |
Position reached |
bool |
Is true if vx=vy=0, i.e. the set position is reached. |
|
Orientation reached |
bool |
Is true if omega=0, i.e. the set orientation is reached. |
|
Pose reached |
bool |
Is true if both position and orientation are reached. |
See Movements