|
<< Click to Display Table of Contents >> Dialog |
  
|
|
<< Click to Display Table of Contents >> Dialog |
|
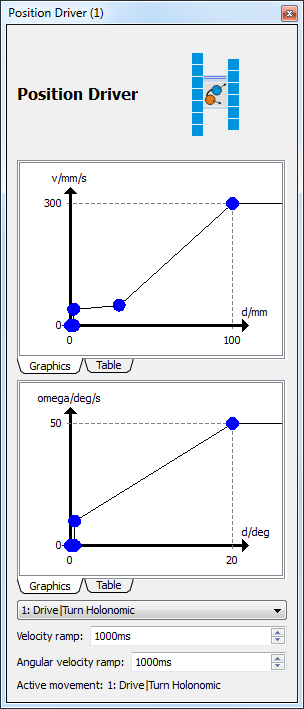
The dialog is split into three parts.
The upper part reflects the mapping from distance to the target position d (in mm) to the driving velocity v (in mm/s).
The middle part reflects the mapping from angular distance to the target orientation d (in 1°) to angular velocity omega (in 1°/s). The angular distance is in the range [0°, 180°]. Clockwise and counter clockwise rotations are treated similar. Rotation will be performed clockwise or counter clockwise so that the angular distance is minimal.
With the ComboBox
the kind of movement can be selected (see Movements). The selected movement becomes the active movement
| 1. | at program start. |
| 2. | when the input "restart" is set true. |
The velocity ramp is the time in milliseconds after which 100% of the desired velocity is reached. This avoids an abrupt jump of velocity at the beginning of the movement.
The angular velocity ramp is the time in milliseconds after which 100% of the desired angular velocity is reached. This results in a damping of the movement when a new rotation begins.