|
<< Click to Display Table of Contents >> Movements |
  
|
|
<< Click to Display Table of Contents >> Movements |
|
Four different kinds of movements are possible. Two of them are applicable for holonomic and nonholonomic vehicles each. As Robotino has a holonomic drive - all three degrees of freedom can be altered independently - Robotino can perform all four kinds of movement. For nonholonomic movements the output vy is 0.
Movements start when the program starts or when the input "restart" becomes true. Effectively, in the 2nd case the movement begins when the input "restart" is reset to false.
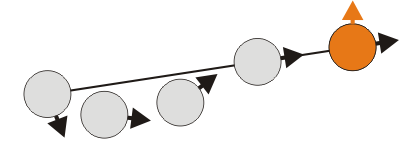
Movement 1 - drive, turn - (holonomic)
Step 1: drive to the target position keeping the orientation at the initial position
Step 2: after reaching the target position turn until the target orientation is reached
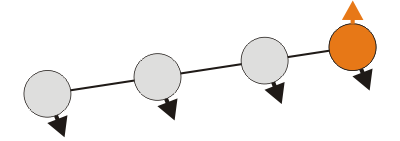
Movement 2 - drive & turn - (holonomic)
Step 1: drive and simultaneously turn to the target orientation
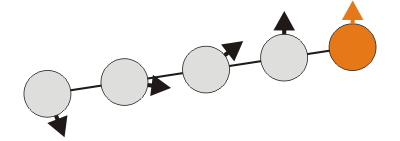
Movement 3 - turn, drive, turn - (nonholonomic)
Step 1: turn to the driving direction
Step 2: drive to the target position
Step 3: after reaching the target position turn to the target orientation
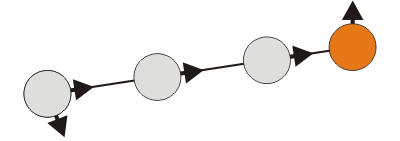
Movement 4 - drive & turn, turn - (nonholonomic)
Step 1: Drive and turn in to driving direction
Step 2: after reaching the target position turn until the target orientation is reached