|
<< Click to Display Table of Contents >> Example |
  
|
|
<< Click to Display Table of Contents >> Example |
|
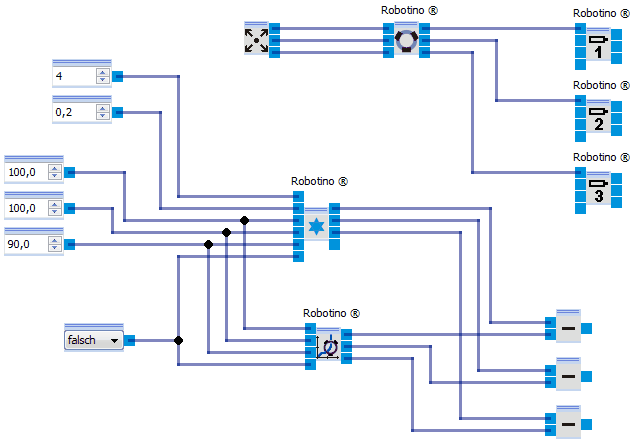
The control panel is used to move Robotino.
Northstar shall detect the projector that belongs to room 4. The new NorthStar projector must be set to room 1.

Via the boolean constant (true/false) the coordinate systems of Northstar and the odometry can be transformed so that "current Northstar pose" == "current odometry pose" == (100,100,90).
By subtracting the components of Northstar and odometry, you can see the error occurring between odometry and Northstar.