Dialogue



|
|
|
Dialogue |
|
|
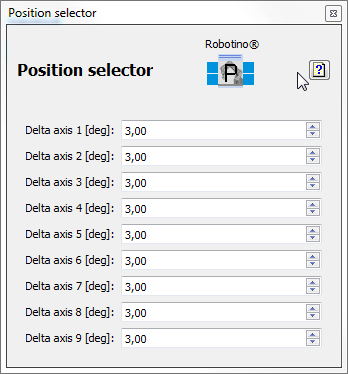
Ce dialogue permet de spécifier l'écart maximal admissible par rapport à la position de consigne de l'axe. Si toutes les positions de l'axe se situent dans la plage de tolérance de la position de consigne, la sortie "Position atteinte" passe à vrai. |