|
Mit dem Positionsfahrer können Positionen angefahren werden.
Der Positionsfahrer berechnet aus einer Soll- und einer Istposition Geschwindigkeit und Winkelgeschwindigkeit, so dass Robotino von der Ist- zur Sollposition fährt.
Eingänge
|
Typ
|
Einheit
|
Beschreibung
|
x Soll
|
float
|
mm
|
x Koordinate der Soll Position im Weltkoordinatensystem.
|
y Soll
|
float
|
mm
|
y Koordinate der Soll Position im Weltkoordinatensystem.
|
phi Soll
|
float
|
Grad
|
Winkel phi der Soll Position im Weltkoordinatensystem.
|
x Ist
|
float
|
mm
|
x Koordinate der Ist-Position im Weltkoordinatensystem.
|
y Ist
|
float
|
mm
|
y Koordinate der Ist-Position im Weltkoordinatensystem.
|
phi Ist
|
float
|
Grad
|
Winkel phi der Ist-Position im Weltkoordinatensystem.
|
Neustart
|
bool
|
|
Startet die Bewegung erneut
|
|
|
|
|
Ausgänge
|
|
|
|
vx
|
float
|
mm/s
|
x Geschwindigkeit.
|
vy
|
float
|
mm/s
|
y Geschwindigkeit.
|
omega
|
float
|
Grad/s
|
Winkelgeschwindigkeit.
|
Position erreicht
|
bool
|
|
Sobald die Ausgänge vx und vy 0 liefern, wird die Zielposition als erreicht angesehen und der Ausgang liefert wahr.
|
Orientierung erreicht
|
bool
|
|
Sobald der Ausgang omega 0 liefern, wird die Zielorientierung als erreicht angesehen und der Ausgang liefert wahr.
|
Pose erreicht
|
bool
|
|
Der Ausgang liefert wahr, wenn sowohl die Zielposition als auch die Zielorientierung erreicht sind. Ansonsten unwahr.
|
Siehe Bewegungen
--------------------OLD_TEXT---------------------
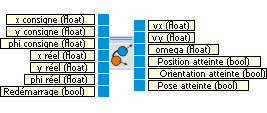
Le parcoureur de position permet de se rendre d'une position à l'autre.
Le parcoureur de position calcule la vitesse et la vitesse angulaire en fonction de la position de consigne et de la position réelle de sorte que Robotino se rende de la position réelle à la position de consigne.
Entrées
|
Type
|
Unité
|
Description
|
x cons
|
float
|
mm
|
Coordonnées x de la position de consigne dans le système de coordonnées mondial.
|
y cons
|
float
|
mm
|
Coordonnées y de la position de consigne dans le système de coordonnées mondial.
|
phi cons
|
float
|
deg
|
Coordonnées phi de la position de consigne dans le système de coordonnées mondial.
|
x eff
|
float
|
mm
|
Coordonnées x de la position réelle dans le système de coordonnées mondial.
|
y eff
|
float
|
mm
|
Coordonnées y de la position réelle dans le système de coordonnées mondial.
|
phi eff
|
float
|
deg
|
Coordonnées phi de la position réelle dans le système de coordonnées mondial.
|
Redémarrage
|
bool
|
|
Redémarre le mouvement
|
|
|
|
|
Sorties
|
|
|
|
vx
|
float
|
mm/s
|
Vitesse x.
|
vy
|
float
|
mm/s
|
Vitesse y.
|
omega
|
float
|
deg/s
|
Vitesse angulaire
|
Position atteinte
|
bool
|
|
Dès que les sorties vx et vy délivrent 0, la position de destination est considérée atteinte et la sortie délivre un signal vrai.
|
Orientation atteinte
|
bool
|
|
Dès que la sortie omega délivre 0, l'orientation de destination est considérée atteinte et la sortie délivre un signal vrai.
|
Pose atteinte
|
bool
|
|
La sortie délivre un signal vrai si à la fois la position et l'orientation de destination sont atteintes. Sinon faux.
|
Voir Mouvements
| 

