Cuadro de diálogo



|
|
|
Cuadro de diálogo |
|
|
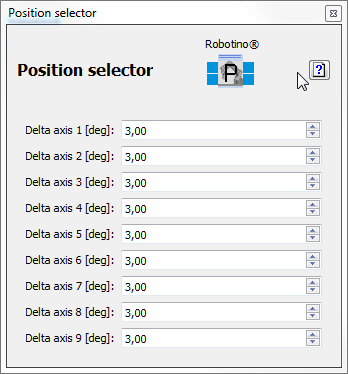
En este cuadro de diálogo se puede indicar la desviación máxima admisible de cada eje con respecto a la posición nominal. Si todas las posiciones de eje están dentro del margen de tolerancia de la posición nominal, en la salida "Posición alcanzada" se establece "verdadero". |